都各有什么优缺点,一览微软研究的四款VR运动控制器原型
发布时间:2018-03-19 12:00 来源: 映维网
微软研究院雷德蒙德实验室的首席研究院麦克 · 辛克莱尔(Mike Sinclair)表示:" 问问自己,你希望以一种什么样的方式来与虚拟对象交互呢?答案很简单,就是我们都希望能像真实对象那样处理它们,你可以伸出手去抓住它们,然后捡起来感受它们的组成,而且这全部都是以一种无需学习的自然方法来实现。"

辛克莱尔是微软的其中一名研究人员,他每天都在努力,希望能够在或许是 VR 其中一个最具挑战性的研发领域取得突破,为 VR 用户带来真正身临其境和逼真的触觉体验。
尽管 VR 和 AR 在过去 30 年间已经取得了极大的进步,头显设备能够为我们呈现神奇的视觉世界和 3D 视频,但当我们试图用双手触碰任何虚拟对象的时候,幻觉就会打破,因为双手触碰到的实际上只有空气。
与消费者设备的视觉和音频渲染能力相比,今天的触觉反馈体验只局限于隆隆感觉,亦即通过内置马达或致动器生成的震动。研究人员正继续努力实现不同触觉震动的逼真渲染,而消费者正在期盼这种体验能够早日成为现实。
触觉反馈成为如此一个挑战的原因有很多。看多电影的你都知道我们可以欺骗眼睛和耳朵。但触觉完全不同,其代表了一种复杂程度多数倍的挑战。其中一部分挑战来自于硬件领域。诸如外骨骼和其他手部穿戴设备等实验室原型一般都十分笨重。大部分当前的原型设备仅模拟特定的触觉,如纹理,热度,或重量,而这样的覆盖程度或许不足以吸引用户。能够实现足够多样性的复杂机制却过于昂贵,过于大型,或过于脆弱,难以成为可行的消费者产品。
微软研究院院对一直在探索的可以能够产生多种触觉反馈,并且可以适用于手持式 VR 控制器的方式,从而令用户能够触摸和抓住虚拟对象,感受到指尖沿虚拟表面的滑动…他们的愿望是:今天的用户能够以一种更自然,而且比以往任何事都都更多样地与虚拟数字世界进行交互。
今天微软研究院回顾了他们在过往研发的四款新型触觉反馈原型。我们希望再次与大家分享微软的最新研究,并期待这可以鼓励和激发社区带来更多的创新和发展。
1. CLAW
团队研发的第一款新型触觉反馈控制器是 CLAW。通过使用单个电机,CLAW 将 VR 控制器的概念扩展至一款多功能触觉反馈工具。CLAW 跟标准的 VR 控制器有点相像,但在仔细观察后你会发现一个用以模仿力反馈的独特机械臂。这个原型最初是在斯坦福大学实习生 Inrak Choy 的帮助下研发而成。
CLAW 可以充当多功能控制器,其包含 VR 控制器的常见设置(如拇指键,摇杆和扳机键等等),以及用于大部分常见手部交互的一系列触觉渲染:抓取对象,触碰虚拟表面和接收力反馈。

但 CLAW 的独特之处在于,它能够通过感知用户抓握的差异和虚拟场景的情境来调整触觉渲染。当用拇指抵住食指指尖时,设备将模拟抓取操作:围绕虚拟对象闭合手指将产生阻力,生成一种对象位于食指和拇指之间的感觉。嵌在食指支架中的力反馈传感器可以改变电机的响应曲线,从而可以检测不同材料的对象(从完全刚性的木块到弹性海绵)。如果不形成抓取姿势,而是平展手掌以形成指向手势,控制器将提供触摸虚拟表面的感觉。
将手指指尖移向虚拟对象的表面将生成一种推回手指的阻力,并阻止手指穿透虚拟表面。另外,当食指沿着虚拟表面滑动时,安装在食指尖端下方的音圈将产生来自表面纹理的小幅振动。感知用户施加的力量也可以提升用户与虚拟对象的交互。CLAW 本身只是一项成就,但这只是微软研究院在触觉反馈控制器领域众多创新的其中一个。
2. Haptic Wheel
为了进一步探索在食指和拇指下渲染摩擦触觉体验和材料属性的可能性,微软研究院研发了另一项新型触觉反馈控制器原型。Haptic Revolver(亦被称为 Haptic Wheel)是由研究人员和华盛顿大学实习生 Eric Whitmire 合作研发而成。这款设备主要使用上下移动的致动轮子来渲染与虚拟表面的触摸接触,并在用户沿着虚拟表面滑动时旋转以渲染剪切力和运动。
根据控制器的设计,用户食指置放于转轮轴的凹槽内。当用户触碰虚拟表面时,转轴升起并接触指尖,其旋转则根据手部沿着表面运动的速度来模拟指尖与虚拟表面的摩擦。
Haptic Revolver 的被试表示,触觉反馈震动十分逼真,能够匹配虚拟手部运动。即便是他们自由地在虚拟表面上移动手部,而且渲染的转轴运动受限于水平方面,用户仍然报告说触觉反馈相当逼真。

(左图)当用户悬停在蓝色表面时,渲染引擎将向手指呈现合适的转轮表面,并开始追踪黑色表面的附件边缘。(中图)随着用户接近表面,渲染引擎定位转轮,令边缘靠近手指。(右图)在用户悬停在更小的黑色表面时,渲染引擎调整转轮的增益,从而确保正确地渲染两个边缘。
触觉转轮可以更换和搭载包含不同的触觉元素,例如形状,纹理或有源电子元件,这样在用户探索虚拟环境时就能提供不同的震动反馈。由于设备可以接受系统的追踪,可以在空间上注册触觉元素与环境。电机旋转触觉反馈转轮以确保转轮上的特征匹配虚拟场景。例如在虚拟卡牌游戏中,当用户触碰到卡牌,筹码或者桌子时,设备旋转转轮以在指尖下渲染合适的纹理。随着用户在其中一个表面滑动时,转轮在指尖下移动,渲染剪切力和运动。
Haptic Wheel 可推广至一系列的应用。应用程序同时可以采用佩戴所需触觉功能的定制转轮。例如,一款虚拟宠物动物园游戏可以采用包含各种纹理的转轮,而虚拟驾驶舱环境可以采用搭载按钮和开关等输入元素的转轮。Haptic Wheel 说明了易于抓取和使用的简单设备可以生成逼真的指尖触感。
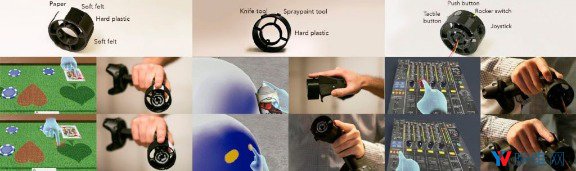
(左图)控制器的转轮用以渲染的卡牌游戏的不同纹理。这一示范采用的转轮包含两个软带区域,硬塑料脊和一小部分纸片组成。当用户触摸场景中的对象时,合适的纹理将放置在指尖下方。(中图)在绘画和雕刻示范中,这强调了渲染形状和感知施加到转轮上的作用力的能力。示范所采用的转轮由凸块和一个凸脊组成(模拟夹持工具),而用户则通过按压转轮来激活工具。(右图)包含多个物理 UI 元素的转轮可以向混音板应用程序提供触觉反馈。当用户触摸虚拟 UI 元素时,他们不仅能够感受到类似物理元素的形状,还可以与小部件进行物理交互。
3. Haptic Links
触觉领域的另一项里程碑是用户可以在 VR 或 AR 应用程序中使用双手。比如说用两只手来移动箱子;又或者是一手拿弓,一手拿箭,感受真正的拉弓射箭;甚至是用扳手来转动虚拟水管。
由微软研究院和斯坦福大学实习生 Evan Strasnick 研发的 Haptic Links 包含了多种连接器,能够通过两个手持式 VR 控制器渲染各种刚度。Haptic Link 能够动态地改变用户双手所能感知的作用力,从而支持各种对象和交互。它们可以将控制器严格锁定在任意配置中,令其变成一种类双手工具。它们可以约束控制器之间的特定自由度或运动方向,例如在转动曲柄或拉动控制杆的时候。它们甚至可以在连续范围内设定硬度以产生摩擦,粘度或张力。通过这些方式,Haptic Links 增强了现有手持控制器的真实机械约束,使 VR 场景中的交互和游玩变得更加身临其境。

在构思 Haptic Links 的时候,微软研究团队从许多设计考量开始入手,包括启动时的刚度,放松时的灵活性,刚度分辨率,重量,体积,惯性矩,致动速度,功耗,噪点和运动范围等等。理想的 Haptic Link 在启动之前几乎无法被用户察觉,但可以根据需要快速,强烈和精确地变硬。
微软的探索带来了三个 Haptic Links 原型,而它们全部都可以支持和中断手持式 VR 控制器的 6 自由度运动。每种设计都有自身的折衷和优势,都有最适合的特定应用。微软研究团队认为,VR 体验设计师可以自由选择最能满足其需求的 Haptic Link,在用户进入虚拟世界之前快速将推荐的 Haptic Link 附加到他们的控制器上。

Chain 原型(上图中心)采用由球窝元件组成的高度铰接式链条。一根厚实的缆线穿过链条并连接到每端的线性致动器上。随着线性致动器的扩展,链条保持松动,以便用户可以在 3D 空间中任意移动控制器。当线性致动器缩回缆线时,球窝元件相互压缩,增加链条中每个接头处的摩擦力。这样整个链条就会变得僵硬,从而固定两个控制器之间的当前空间关系。
Layer-Hinge(上图左侧)使用球节来支持控制器的旋转,并且搭载了可以控制控制器之间距离的铰链。其优点是它可以选择性锁定控制器运动中的各个自由度。例如,如果铰链锁定但球节保持自由,控制器就能够以固定的距离旋转,就像操纵杆一样。此外,它可以相对精确地控制每个关节的摩擦,从而在铰链和球节中呈现连续的刚度值范围。铰链可以根据应用设定为不同的阻力。
Ratchet-Hinge(上图右侧)使用了类似的球节,但用双棘轮机制取代铰链,这样设备就能够独立地制动向内或向外的运动。当两个棘轮啮合时,齿轮固定;两个脱开时,齿轮则可以自由旋转。当一个棘轮脱开时,齿轮可以在一个方向上自由移动,但不能沿相反方向移动。
Haptic Links 说明了控制器间可变刚度反馈能够改善 VR 中双手对象的触觉渲染和 VR 中的交互。多个实施例为对象渲染提供了不同的功能和优势。
简而言之,Haptic Links 可以改善双手对象的感知真实性,同时不会显着降低需要不相交控制器的正常交互的渲染。
4. Canetroller
秉承微软数十年来一贯的兼容性,研究团队很早就确定了一个特别能从触觉技术进步中受益的社区:低视力人群和盲人社群。" 传统 " 虚拟现实在本质上是强烈视觉化的体验,无法支持视障人群。微软研究院与康奈尔大学的实习生 Yuhang Zhao 和华盛顿大学实习生的 Cindy Bennett 一同研发了 Canetroller 原型。这样,在现实世界中熟悉使用白色手杖的用户就能够将他们的导航能力转移到虚拟环境之中。
Canetroller 提供三种类型的反馈:(1)由可穿戴式可编程制动器机构产生的物理阻力,当虚拟手杖与虚拟物体接触时,物理阻碍控制器 ; (2)振动触觉反馈,其模拟甘蔗撞击物体或触摸并拖过各种表面时的振动 ; (3)空间 3D 听觉反馈模拟真实世界甘蔗相互作用的声音。
Canetroller 在娱乐,定向行动训练,以及环境准备等领域具有重大的潜力。微软研究院希望这份研究能够激励研究人员和设计人员设计更有效的工具,从而令 VR 更具包容性,为世界各地不同的人群提供支持。

(A)一位视障人士正在接受微软研究院的 VR 评估,她使用的设备包括 VR 头显和 Canetroller;(B)Canetroller 的机械元件;(C)虚拟场景和真实场景的叠加说明了用户如何利用 Canetroller 设备进行导航,并与虚拟垃圾箱进行交互;(D)使用 Canetroller 来导航虚拟街道:插图为真实的物理环境,而渲染图则是对应的虚拟场景。请注意,用户在使用 VR 系统时没有任何视觉反馈。为了清晰起见,这里的示例采用了效果图。
测试表明,Canetroller 是一个前景光明的工具,可以支持低视力和盲人导航不同的虚拟空间,还可以帮助他们识别虚拟办公室中的物体位置和材料。Canetroller 可以支持新颖的定向行动训练。在这种训练中,人们可以首先在特定的 VR 环境下练习使用手杖进行导航的技能,然后才将其应用在真实世界。这种类型的设备还可以令视障人群享受 VR 游戏和娱乐。
5. 写在最后
微软研究院表示,他们在触觉反馈领域的每一项研究,尤其是结合起来后,都可以为其他研究人员带来灵感,为即时商业应用创造机遇,并且为社区点燃新希望(例如改善视障人士的生活质量)。此外,微软研究人员希望他们的创新可以鼓励社区在消费者外设中采用更多的触觉渲染技术。我们同样希望即将发布的触觉产品能够进一步提升 VR 和 AR 产品的逼真感和身临其境感。微软研究院的 Eyal Ofek 表示:" 我希望未来虚拟对象与真实对象之间的界限可以变得模糊,其中我们与虚拟技术的交互将变成像现实世界中的操作那样自然。"
推荐阅读